


Distintos profesionales de la Unidad de Daño Cerebral del Hospital Beata María Ana, bajo la coordinación académica del terapeuta ocupacional Pedro A. Serrano, imparten este postgrado
Por tercer año consecutivo, se ha inaugurado en Talavera de la Reina el ‘Máster en terapias basadas en robótica y realidad virtual (MTBRRV)’ de la Universidad de Castilla La Mancha (UCLM). Begoña Polonio, decana de la UCLM, y Marta Rodríguez, secretaria académica de Títulos, coordinan desde la universidad este título propio, que puede cursarse tanto de forma presencial desde la Facultad de Terapia Ocupacional, Logopedia y Enfermería, como de manera virtual mediante videoconferencia, para facilitar la participación en el mismo.
Iris Dimdwadyo,terapeuta ocupacional y profesora de Univ. La Salle, y nuestro compañero Pedro A. Serrano, terapeuta ocupacional de la Unidad Daño Cerebral del Hospital Beata MAría Ana (HBMA), como profesores asociados clínicos para la UCLM, coordinan los contenidos teóricos (modulo I) y prácticos (módulo II) del HN Parapléjicos de Toledo y del H. Beata respectivamente. Como novedad, en esta tercera edición, el centro Lescer se une al proyecto.
 En esta III Edición del MTBRRV, en el módulo teórico (del 25 de enero al 2 de febrero de 2017) han participado como docentes la terapeuta ocupacional Diana Moya, que junto con la logopeda Estefanía Rodriguez, ha compartido su experiencia con nuevas tecnologías en población infantil, así como las terapeutas ocupacionales Marta Soriano y Virginia Aranda, que explicaron la rehabilitación robótica del miembro superior a nivel proximal con el exoesqueleto Armeo® y el robot Pablo®. El terapeuta ocupacional y coordinador del máster para UCLM en el Hospital Beata María Ana, Pedro A. Serrano, centró su ponencia en las evidencias del uso de la robótica en miembro superior y mano con Amadeo®, Handtutor y otros dispositivos tipo guante. Las fisioterapeutas Teresa Criado, Laura Andrés, Paloma Fernández y Ana Mendigutía expusieron el uso de las nuevas tecnologías robóticas basadas en cycle systems de Thera, Vibrosfer y en plataformas de equilibrio Tymo y Balance Trainer, respectivamente. El neurólogo Juan Pablo Romero incidió en la rehabilitación del temblor y otros trastornos del movimiento en su ponencia. Cerró el módulo el médico rehabilitador Juan Marín con la aportación de una visión global de los dispositivos disponibles para la rehabilitación de niños y adultos.
En esta III Edición del MTBRRV, en el módulo teórico (del 25 de enero al 2 de febrero de 2017) han participado como docentes la terapeuta ocupacional Diana Moya, que junto con la logopeda Estefanía Rodriguez, ha compartido su experiencia con nuevas tecnologías en población infantil, así como las terapeutas ocupacionales Marta Soriano y Virginia Aranda, que explicaron la rehabilitación robótica del miembro superior a nivel proximal con el exoesqueleto Armeo® y el robot Pablo®. El terapeuta ocupacional y coordinador del máster para UCLM en el Hospital Beata María Ana, Pedro A. Serrano, centró su ponencia en las evidencias del uso de la robótica en miembro superior y mano con Amadeo®, Handtutor y otros dispositivos tipo guante. Las fisioterapeutas Teresa Criado, Laura Andrés, Paloma Fernández y Ana Mendigutía expusieron el uso de las nuevas tecnologías robóticas basadas en cycle systems de Thera, Vibrosfer y en plataformas de equilibrio Tymo y Balance Trainer, respectivamente. El neurólogo Juan Pablo Romero incidió en la rehabilitación del temblor y otros trastornos del movimiento en su ponencia. Cerró el módulo el médico rehabilitador Juan Marín con la aportación de una visión global de los dispositivos disponibles para la rehabilitación de niños y adultos.
En el módulo de practicum en la Unidad de Daño Cerebral de Hermanas Hospitalarias en Madrid (del 13 de febrero al 25 de abril de 2017), los 15 alumnos aprenderán, en rotaciones periódicas, el manejo coadyuvante y sinérgico de las tecnologías robóticas en neurorrehabilitación, bajo la tutela compartida de varios profesionales de las áreas de terapia ocupacional y fisioterapia, y bajo la supervisión global del terapeuta ocupacional de hospitalización Pedro A. Serrano. En este curso académico, los alumnos podrán elaborar hasta cuatro proyectos fin de título bajo su tutela en el HBMA y otros seis repartidos entre el HN Parapléjicos de Toledo y Lescer.

Foto: Bajo la supervisión de varios profesionales en el practicum 2016, alumnas de la II Ed. del MTBRRV aprenden el manejo combinado de los distintos dispositivos, como Armeo®, para la neurorrehabilitación en la Sala de Robótica de la Unidad de Daño Cerebral del HBMA
A este proyecto, se suman los rotatorios del prácticum de los 6 alumnos del título propio de postgrado “Especialista en TO aplicada al daño cerebral adquirido” de la misma universidad, que visitarán en 6 rotatorios el centro desde el 5 de mayo al 16 junio de 2017.
Efectos positivos en la aplicación clínica
Por su efectividad, en los últimos años las Unidades de neurorrehabilitación de la Red Menni han incrementado las terapias basadas en robótica. Actualmente disponemos en la Sala de Robótica del HBMA del robot de mano Amadeo®, del dispositivo para miembro superior Pablo® y de la plataforma de equilibrio Tymo, todas ellas de Tyromotion. Disponemos también de robot Armeo® de Hocoma para la rehabilitación del miembro superior, de la plataforma de equilibrio Balance Trainer de Biodex y del sistema de Cycle con feedback de Thera. Todos ellos, en su aplicación clínica, han demostrado positivos efectos en la neurorrehabilitación del paciente con daño cerebral.
Gracias al trabajo de varios profesionales de la Unidad, se ha podido participar en diferentes proyectos y testar la aplicación clínica piloto de algunos dispositivos, arrancando con Physiobot y Amadeo® en 2012 y continuando con otros sistemas, como Toyra (2013-2014), Arm-assist (2015) o Handtutor (2015-2016). De igual modo, nuestros expertos han difundido los resultados de esta nueva área de conocimiento en diferentes congresos y publicaciones (Ej.Serrano et al., 2013; Mendigutía et al., 2014), y a través de un proyecto de docencia tan ilusionante como este.
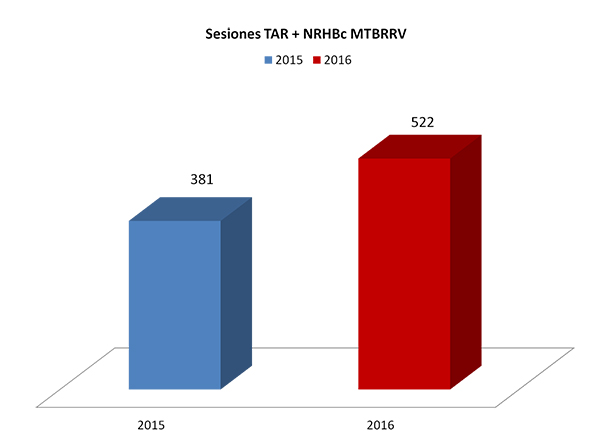
Gráfico: Incremento de las sesiones de robótica entre la I Ed. (2015) y II Ed. (2016) del MTBRRV, solo computando las sesiones específicas de neurorrehabilitación con robótica realizadas con los pacientes entre los meses de febrero y mayo.




Buenas tardes, quisiera informacion acerca de esta formacion, soy licenciada en terapia ocupacional de Argentina, de la provincia de Tucuman, me dedico a la rehabilitacion de mano y miembro superior y atencion a pacientes con secuelas neurologicas, quisiera saber si se puede realizar on line o a distancia, saludos.
Estimada Romina:
Disculpa la tardanza en contestar, tu mensaje se había quedado sepultado tras una montaña de spam. La parte teórica puedes realizarla online, pero las rotaciones en los centros (Hospital Beata María Ana, Neuron, …) debe realizarlas de manera presencial. Aunque desde la organización intentan tener la máxima flexibilidad para con el alumnado. Lo más práctico es que contactes con la página oficial del máster,o con Marta Rodríguez, secretaria académica del mismo (Marta.RHernandez@uclm.es), para que puedas resolver cualquier otra duda.
Esperando haber sido de ayuda, recibe un cordial saludo