


Robótica en la rehabilitación del miembro superior: innovación funcional en evolución - 13 maiatza, 2025
La robótica aplicada a la rehabilitación del miembro superior ha transformado significativamente la manera en que se aborda la recuperación tras daño neurológico. Este artículo ofrece una panorámica comprensible y rigurosa que parte del análisis de necesidades clínicas y contextos de uso, para luego presentar los principales tipos de soluciones robóticas, su evolución tecnológica, sus aplicaciones clínicas contrastadas y los desafíos que aún persisten en su implementación rutinaria.
Escrito por:
Este artículo ha sido elaborado por el equipo del Servicio de Daño Cerebral y Neurorehabilitación de Ospitalarioak Fundazioa combinando la experiencia clínica directa con una revisión detallada de la literatura científica reciente. Nuestro objetivo es ofrecer una visión accesible pero rigurosa sobre las posibilidades actuales de la robótica en la rehabilitación del miembro superior, tanto para profesionales como para personas interesadas en el campo de la salud, la tecnología y la innovación terapéutica.
Rehabilitación robótica: una respuesta al reto funcional tras el daño neurológico
La recuperación de la extremidad superior tras eventos como un ictus o una lesión medular representa uno de los mayores retos en neurorrehabilitación. La debilidad, pérdida de destreza, coordinación y funcionalidad que estos pacientes presentan requieren de terapias altamente intensivas, repetitivas y motivadoras. Es precisamente aquí donde la robótica se ha insertado como una herramienta de alto valor añadido.
Más allá de su atractivo tecnológico, los sistemas robóticos permiten optimizar los recursos terapéuticos humanos, estandarizar intervenciones, registrar de manera objetiva parámetros motores y mantener niveles de intensidad que serían difíciles de sostener con intervenciones exclusivamente manuales. La robótica no busca reemplazar al terapeuta, sino potenciar su capacidad de intervención.
Tipologías de dispositivos robóticos: una clasificación centrada en la función y la interacción
Una revisión extensa de Maciejasz et al. (2014) ya propuso esta categorización funcional como alternativa a las clasificaciones puramente técnicas, destacando la relación entre diseño mecánico y objetivos terapéuticos.
En lugar de seguir una clasificación técnica tradicional, proponemos un enfoque basado en el grado de integración con el paciente y su aplicabilidad clínica.
Sistemas de contacto distal o End Effector
Diseñados para interactuar con el paciente a nivel de mano o muñeca, estos dispositivos (como el Amadeo de Tyromotion o el InMotion ARM) son ideales para fases iniciales o cuando el control motor está muy deteriorado. Su foco está en facilitar tareas como la prensión, extensión o movimientos básicos de alcance. En estos casos, la simplicidad del diseño permite una rápida implementación clínica, incluso en contextos de rehabilitación temprana.
Dispositivos multisegmentarios o exoesqueléticos
Incluyen exoesqueletos rígidos que acompañan el movimiento desde el hombro hasta la mano, como el Armeo Power, Harmony SHR o el MyoPro. Estos sistemas permiten entrenar patrones complejos, ajustar grados de libertad y aplicar terapias más orientadas a tareas funcionales. Aunque su implementación requiere mayor adaptación, su beneficio en pacientes con potencial de recuperación coordinada es notorio.

Armeo Power
Exotrajes y soluciones portátiles
Concebidos como asistentes de bajo peso, estos sistemas textiles o neumáticos se orientan a fases ambulatorias o uso domiciliario. Aunque aún no alcanzan el nivel de sofisticación de los exoesqueletos rígidos, representan una línea en expansión gracias a su facilidad de uso, bajo coste y potencial para programas de rehabilitación continua o preventiva.
Escenarios clínicos de aplicación: de la cama al entorno comunitario
La robótica para la rehabilitación del miembro superior se ha consolidado como una herramienta útil en distintos escenarios clínicos (Diaz et al., 2025), desde las unidades de cuidados intensivos hasta los entornos domiciliarios. Su uso no se limita a centros de alta especialización, sino que comienza a integrarse en estructuras asistenciales más accesibles, como hospitales comarcales, unidades ambulatorias y centros de día.
Ictus en fase aguda y subaguda
Durante las primeras semanas tras un ictus, el cerebro atraviesa una ventana crítica de plasticidad, lo que convierte esta etapa en especialmente relevante para la intervención intensiva. Dispositivos como el InMotion ARM han demostrado ser seguros y efectivos en esta fase de recuperación temprana tras un ictus, como lo confirman los hallazgos de Zhao et al. (2023), quienes documentaron mejoras funcionales significativas al combinar estos sistemas con entrenamiento dirigido en esta fase, facilitando el inicio precoz del movimiento pasivo-asistido incluso cuando el paciente presenta una hemiparesia completa. La posibilidad de programar sesiones repetitivas y graduales contribuye a prevenir la rigidez articular, el dolor y la pérdida de esquema corporal.
Fase crónica post-ictus
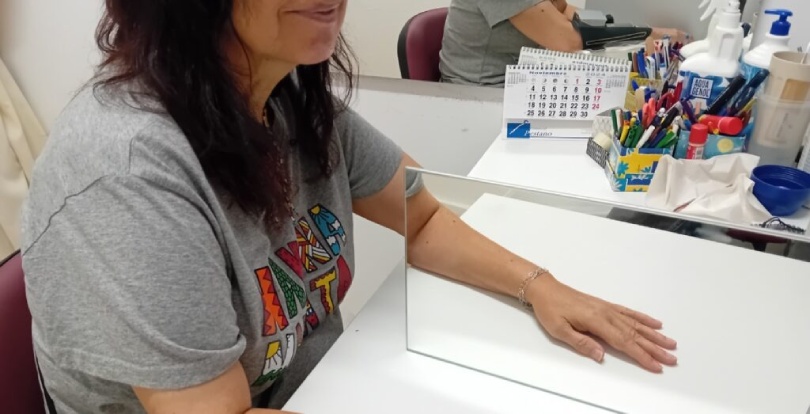
Terapia en espejo
En pacientes con más de seis meses de evolución, la robótica permite mantener el entrenamiento motor incluso cuando la mejoría espontánea se ha estabilizado. Diversos estudios han evidenciado que programas de robótica orientada a tareas, como los analizados por Zhang et al. (2022), pueden mejorar la coordinación, reducir la fatiga y potenciar la independencia funcional en pacientes con ictus en fase crónica. El uso de exoesqueletos en esta etapa suele combinarse con estrategias como la terapia espejo, la estimulación eléctrica funcional y la imaginería motora.
Parálisis cerebral infantil

Armeo Spring
En población pediátrica, la robótica debe adaptarse a las dimensiones corporales, al perfil cognitivo y a las particularidades emocionales del niño. Dispositivos como el Armeo Spring Pediatric permiten una intervención lúdica, centrada en tareas concretas y con posibilidad de feedback positivo constante. Un estudio de Keller y van Hedel (2017) demostró que este dispositivo mejora significativamente la duración, velocidad y fluidez del movimiento en niños con parálisis cerebral hemipléjica, lo que lo convierte en una herramienta eficaz para esta población. Estas sesiones se integran en programas globales con múltiples enfoques terapéuticos, lo que favorece la implicación del menor y su entorno.
Lesión medular y enfermedades neurodegenerativas
En lesiones medulares incompletas, la robótica puede actuar como facilitadora del patrón motor residual, entrenando la musculatura proximal y favoreciendo la estabilidad troncal. En enfermedades como esclerosis múltiple, atrofia muscular espinal o ataxias hereditarias, el objetivo cambia: no se busca tanto recuperar como conservar, prevenir complicaciones ortopédicas y mantener la función durante el mayor tiempo posible. Aquí los exotrajes de soporte activo y los sistemas modulares cobran especial importancia.
Ámbitos ambulatorios y domiciliarios
Con la aparición de sistemas más ligeros y asequibles, la robótica también ha llegado al hogar. Existen ya dispositivos portátiles controlados por tablet que permiten realizar rutinas terapéuticas con supervisión remota. Este avance resulta clave para personas con movilidad reducida, residentes en zonas rurales o con cargas familiares. Un metaanálisis reciente de Tseng et al. (2024) respalda la eficacia de estos dispositivos en la mejora de la funcionalidad del miembro superior tras un ictus, destacando su viabilidad clínica en entornos domiciliarios.
Más allá del movimiento: motivación, biofeedback y adaptación
La dimensión motivacional es crítica en cualquier proceso de rehabilitación, y la robótica ha abierto nuevas vías para potenciarla. La incorporación de sistemas de gamificación y realidad virtual ha demostrado su eficacia en mejorar la adherencia y reducir la percepción de esfuerzo, tal como analizan Gasperina et al. (2021). No se trata solo de “jugar mientras se entrena”, sino de transformar el ejercicio en una experiencia emocionalmente significativa.
Biofeedback multimodal
Los dispositivos modernos pueden integrar sensores visuales, auditivos, táctiles y hápticos que informan al paciente sobre su desempeño en tiempo real. Esta retroalimentación facilita el aprendizaje motor, refuerza los aciertos e indica los errores sin necesidad de intervención verbal constante por parte del terapeuta. Además, el uso de gráficos comprensibles aumenta la implicación del paciente en su propio proceso de recuperación.
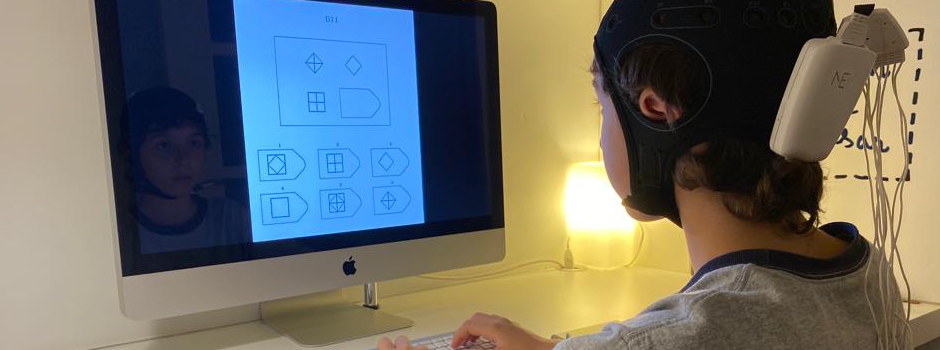
Interacción con la corteza motora y sistemas cognitivos
El movimiento no es solo biomecánica: también implica atención, memoria, motivación y percepción del cuerpo. Al integrar tareas cognitivas con acción física, los sistemas robóticos contribuyen a una activación más global de redes neuronales implicadas en la planificación, ejecución y evaluación del gesto. Este enfoque es especialmente útil en pacientes con déficit atencional o alteraciones de la iniciativa, donde la simple repetición no es suficiente. Como señalan Gasperina et al. (2021), las estrategias de control cooperativo que combinan acción física con estimulación cognitiva tienen un alto potencial de impacto terapéutico en procesos de neurorehabilitación del miembro superior. Esta perspectiva está alineada con el enfoque defendido por Krakauer et al (2012)., quien ha argumentado en múltiples publicaciones que la recuperación motora significativa requiere el compromiso simultáneo de redes motoras y cognitivas para inducir una reorganización funcional duradera del sistema nervioso central.
Entornos personalizados
La tendencia actual es ofrecer programas adaptativos donde el robot modifique automáticamente el nivel de dificultad, la velocidad de ejecución y el tipo de estímulo según la respuesta del usuario. Esta personalización aumenta la eficiencia terapéutica y evita tanto la frustración como el aburrimiento, dos factores clave en la desmotivación y el abandono.
La posibilidad de modular la intensidad, adaptar los ejercicios a las capacidades del paciente y registrar el progreso ha convertido a estos sistemas en aliados del razonamiento clínico y no simples herramientas automáticas.
Los dispositivos robotizados han demostrado su eficacia especialmente en ictus en fase subaguda, tal como señala la revisión Cochrane de Mehrholz et al. (2020), que concluye que el entrenamiento asistido electromecánicamente mejora la función del brazo y las actividades de la vida diaria en comparación con la terapia convencional o la ausencia de intervención. Por otro lado, el ensayo clínico multicéntrico RATULS (Rodgers et al., 2019) encontró que la rehabilitación robótica intensiva logró mejoras funcionales similares a las de la terapia ocupacional intensiva, con una menor necesidad de recursos humanos. También hay evidencia en patologías menos estudiadas como ataxias, traumatismos craneoencefálicos o enfermedades neuromusculares.
En población pediátrica, su uso se ha ido ampliando con buenos resultados, siendo necesario ajustar los dispositivos al tamaño, la motivación y los objetivos del niño. La robótica también está empezando a emplearse en poblaciones geriátricas, como documentan Kapsalyamov et al. (2020), quienes detallan el impacto de los exoesqueletos en la mejora de la función y calidad de vida en adultos mayores, especialmente para prevenir el deterioro funcional asociado a la inactividad prolongada.
El cumplimiento terapéutico tiene una base neurofisiológica sólida: al combinar la activación de áreas motoras y cognitivas, se estimula la reorganización cortical, un proceso clave en la recuperación funcional tras daño neurológico. Esta interacción multisistémica justifica el interés en enfoques terapéuticos que integran el componente cognitivo dentro del movimiento asistido, y es uno de los fundamentos que sustentan el uso de tecnologías robóticas con retroalimentación sensorial y tareas con propósito.
Retos actuales: escalabilidad, validación e integración en sistemas sanitarios
Además de los obstáculos ya señalados, es importante destacar la dificultad de estandarizar protocolos terapéuticos que incluyan robótica como parte integral del plan de cuidados. Cada dispositivo tiene características únicas, lo que obliga a los clínicos a diseñar planes personalizados que, si bien son eficaces, dificultan la comparación de resultados y la generación de evidencia homogénea.
Otro aspecto crítico es la aceptación por parte de los propios pacientes. Aunque muchas personas muestran curiosidad e interés por la tecnología, también existen resistencias, sobre todo en pacientes mayores, personas con deterioro cognitivo o individuos con experiencia negativa con la tecnología. Es imprescindible acompañar la introducción de estos dispositivos con una labor educativa y motivacional centrada en el usuario.
Asimismo, la falta de regulación homogénea a nivel internacional limita el desarrollo del mercado, como analiza Giansanti (2022), quien destaca que la disparidad normativa entre países ralentiza los procesos de certificación, importación y adopción clínica de tecnologías robóticas. En algunos países, la robótica se considera equipamiento médico de alta complejidad que requiere autorizaciones específicas, mientras que en otros no cuenta con una clasificación clara. Esta disparidad ralentiza los procesos de importación, certificación y aseguramiento.
Por último, se subestima el impacto ambiental de los nuevos desarrollos. La fabricación, el transporte y la sustitución periódica de componentes electrónicos pueden generar una huella ecológica significativa. Diseñar dispositivos sostenibles, reciclables o con ciclos de vida más largos será un desafío ético y técnico para los próximos años.
Entre las principales barreras aún vigentes destaca el coste. Muchos dispositivos siguen siendo económicamente inaccesibles para pequeñas instituciones o pacientes particulares. La falta de modelos de financiación estables o reembolsos condiciona su adopción.
La formación del personal sigue siendo un reto. El manejo óptimo de estos sistemas requiere una curva de aprendizaje, y no todos los centros pueden destinar tiempo y recursos a ello. Tampoco existen guías clínicas ampliamente aceptadas sobre cómo integrar estos dispositivos en programas terapéuticos, lo que dificulta su estandarización.
Por otro lado, aún hay áreas donde la evidencia es limitada: impacto sobre la calidad de vida, coste-efectividad en contextos reales, influencia en la participación social o uso en atención domiciliaria. La investigación debe ir más allá de los ensayos de eficacia y abordar preguntas relacionadas con sostenibilidad, equidad e integración tecnológica.
Futuro conectado e inteligente
El futuro de la robótica en rehabilitación se fundamenta en la integración sinérgica con otras tecnologías emergentes. Tal como señalan Proietti et al. (2016), el desarrollo de estrategias de control más precisas —como el control por asistencia variable o basado en la intención del usuario— potencia la interacción hombre-máquina, optimizando así la eficacia terapéutica en exoesqueletos para el miembro superior.
A este avance se suma el potencial transformador de la inteligencia artificial, que permite adaptar en tiempo real la asistencia robótica según el rendimiento del paciente, aumentando la personalización y la efectividad del tratamiento. Paralelamente, el análisis de grandes volúmenes de datos (big data) posibilita la detección de patrones de recuperación, la segmentación de perfiles clínicos y el diseño de intervenciones más eficientes y basadas en evidencia. La inteligencia artificial generativa, además, abre la puerta a modelos predictivos capaces de anticipar trayectorias funcionales y ajustar dinámicamente los planes terapéuticos. Por su parte, los sistemas de big data en salud permiten monitorizar a gran escala los resultados clínicos, evaluar la adherencia y eficacia terapéutica, y facilitar decisiones clínicas más informadas. Estas herramientas, cuando se integran adecuadamente, no solo refuerzan la precisión clínica, sino que permiten construir una rehabilitación más proactiva, inteligente y centrada en el paciente.
El papel de las tecnologías inmersivas también irá en aumento. Realidad aumentada, realidad virtual y entornos gamificados adaptativos estarán disponibles en entornos clínicos y domiciliarios, ampliando la accesibilidad y mejorando la experiencia terapéutica. La integración con sistemas de monitoreo continuo, como sensores portables o smartwatches, permitirá crear circuitos cerrados de retroalimentación clínica y mejorar la seguridad de la rehabilitación en el hogar.
En paralelo, se prevé una expansión de programas institucionales que integren la robótica en la red pública de salud. En países como Japón, Alemania o Corea del Sur ya existen unidades hospitalarias donde el uso de robótica está integrado en programas clínicos regulares, especialmente en centros especializados en neurorrehabilitación o geriatría, como parte de una estrategia nacional de innovación sanitaria.
En definitiva, el futuro no solo depende de la innovación técnica, sino de la capacidad del sistema de salud para adoptar, integrar y escalar estas soluciones bajo una perspectiva centrada en el paciente.
El horizonte de desarrollo se basa en tres pilares: inteligencia artificial, conectividad y personalización. La combinación de datos biométricos, métricas de desempeño y algoritmos de aprendizaje automático permitirá adaptar en tiempo real el nivel de asistencia, detectar fatiga o incluso predecir caídas funcionales.
Se están desarrollando sistemas interoperables con plataformas de historia clínica electrónica y módulos de telerrehabilitación, que permitirán seguimiento remoto, feedback al terapeuta y ajustes terapéuticos personalizados. Esta conectividad será clave para extender la robótica a entornos rurales, reducir la brecha de acceso y favorecer la continuidad de cuidados.
Desde una perspectiva ética, será crucial regular el uso de datos sensibles, evitar sesgos algorítmicos y garantizar que la innovación no acentúe desigualdades. El reto será diseñar robots que no solo sean técnicamente eficaces, sino que se integren en procesos humanizados de atención sanitaria.
Formación, adopción institucional y perspectiva global
La expansión de la robótica en rehabilitación no será completa si no va acompañada de una transformación en la formación de los profesionales sanitarios. Los terapeutas ocupacionales, fisioterapeutas y médicos rehabilitadores deben recibir capacitación específica no solo sobre el uso técnico de los dispositivos, sino también sobre cómo integrarlos clínicamente, seleccionar los pacientes candidatos y ajustar los programas terapéuticos en función de la respuesta. Algunos programas de formación de posgrado y másteres comienzan a incorporar módulos de robótica, pero sigue siendo una oferta limitada.
La creación de protocolos estandarizados, líneas de investigación cooperativas y redes de benchmarking entre centros facilitará la adopción institucional. En este sentido, sería deseable que las sociedades científicas desarrollen guías de práctica clínica sobre el uso de tecnologías robóticas, con recomendaciones claras según tipo de patología, fase evolutiva y objetivos terapéuticos.
A nivel internacional, la disparidad en el acceso a la robótica plantea cuestiones de equidad. Iniciativas como proyectos europeos de cooperación tecnológica, donaciones por parte de fundaciones y alianzas público-privadas podrían cerrar esta brecha. Es fundamental que la innovación no amplíe desigualdades, sino que contribuya a disminuirlas.
Implementación en programas de salud pública y evaluación de impacto
La inclusión de la robótica en programas públicos de salud es uno de los grandes retos y, a la vez, oportunidades del momento. Diversos países están explorando modelos piloto en los que se combinan estrategias de financiación mixta, formación técnica y evaluación de impacto. En España, por ejemplo, algunos hospitales universitarios y centros de neurorrehabilitación han comenzado a adquirir plataformas robóticas como parte de proyectos de innovación sanitaria financiados por convocatorias competitivas nacionales o europeas. Estos programas no solo se centran en la adquisición de tecnología, sino en su validación funcional, económica y organizativa.
Una línea de trabajo emergente es la monitorización del impacto a largo plazo de la robótica en indicadores de salud pública: reducción del número de sesiones necesarias, mejora de la autonomía funcional, disminución de ingresos hospitalarios posteriores, incremento del retorno laboral y reducción de la carga del cuidador informal. Estas métricas son clave para justificar la incorporación de estos dispositivos en las carteras de servicios públicas.
La implicación de las agencias evaluadoras de tecnologías sanitarias será esencial. Estas deberán desarrollar marcos metodológicos adaptados a las características particulares de la robótica rehabilitadora, que combinen análisis clínicos, económicos y éticos. También será clave que los sistemas de codificación y facturación sanitaria reconozcan la especificidad de estas intervenciones, permitiendo su trazabilidad y valoración adecuada dentro de los sistemas de información clínica.
Nuevas líneas de investigación y desarrollo
A medida que se amplía el uso clínico de la robótica en la rehabilitación del miembro superior, emergen también nuevas líneas de investigación con potencial transformador. Una de ellas es la combinación sinérgica de robótica con neuroestimulación cerebral, como han explorado estudios recientes que evalúan el potencial de la estimulación transcraneal por corriente continua (tDCS) aplicada junto a exoesqueletos robóticos para potenciar la plasticidad y mejorar la función motora en pacientes con ictus. Estas técnicas podrían potenciar la plasticidad neuronal cuando se administran en paralelo al entrenamiento motor, y ya se están desarrollando estudios controlados para validar su eficacia en entornos clínicos.
Otra línea prometedora es la robótica asistida por señales cerebrales, en la que se emplean interfaces cerebro-computador (BCI) para generar comandos de movimiento directamente desde la actividad eléctrica cerebral. Aunque aún en fases tempranas de desarrollo, este enfoque podría revolucionar el tratamiento de pacientes con parálisis completa o disociación entre intención motora y ejecución física, como ocurre en el síndrome del miembro inútil tras ictus.
También se está explorando la robótica social como complemento terapéutico. Algunos dispositivos integran funciones de interacción verbal, reconocimiento facial o monitorización del estado de ánimo, lo cual puede favorecer la implicación emocional del paciente en el proceso de recuperación. Esta dimensión emocional, muchas veces olvidada en la rehabilitación clásica, es crucial en procesos largos y potencialmente frustrantes.
Por último, la colaboración entre centros de investigación, empresas tecnológicas y sistemas sanitarios está dando lugar a proyectos colaborativos internacionales que fomentan el desarrollo de plataformas robóticas abiertas, modulares y personalizables. Estas iniciativas no solo aceleran la innovación, sino que democratizan el acceso al conocimiento y permiten a los profesionales adaptar las herramientas a las necesidades locales.
Conclusión
La robótica en la rehabilitación del miembro superior ya no es una promesa futura, sino una herramienta presente con resultados concretos. Su evolución hacia sistemas más inteligentes, conectados y accesibles permitirá no solo mejorar la recuperación motora, sino también ofrecer un enfoque más motivador, centrado en el paciente y basado en datos. Para lograrlo, es necesario un esfuerzo coordinado entre desarrolladores, clínicos, gestores y pacientes. El futuro de la neurorrehabilitación se escribe hoy, y la robótica es uno de sus capítulos más dinámicos.
Referencias bibliográficas
- Bertani, R., Melegari, C., De Cola, M. C., Bramanti, A., Bramanti, P., & Calabrò, R. S. (2017).Robot-assisted rehabilitation of the upper limb after stroke: A systematic review and meta-analysis.NeuroRehabilitation, 41(4), 773–782. https://doi.org/10.3233/NRE-172330
- Diaz FH, Borrás Pinilla C, García Cena CE. Exploring Robotic Technologies for Upper Limb Rehabilitation: Current Status and Future Directions. Journal of Sensor and Actuator Networks. 2025; 14(3):48. https://doi.org/10.3390/jsan14030048
- Gasperina, S.D., et al. (2021). Review on Patient-Cooperative Control Strategies for Upper-Limb Rehabilitation Exoskeletons. Front. Robot. AI, 8, 745018. https://doi.org/10.3389/frobt.2021.745018
- Giansanti, D. (2022). The role of regulatory frameworks in the adoption of medical robotics: current trends and challenges. Healthcare, 10(5), 892. https://doi.org/10.3390/healthcare10050892
- Kapsalyamov, A., Hussain, S., Jamwal, P.K. (2020). State-of-the-art assistive powered upper limb exoskeletons for elderly. IEEE Access, 8, 178991–179001. https://doi.org/10.1109/ACCESS.2020.3027493
- Keller, J., & van Hedel, H. J. A. (2017). Weight-supported training of the upper extremity in children with cerebral palsy: A pilot study. Journal of NeuroEngineering and Rehabilitation, 14(1), 87. https://doi.org/10.1186/s12984-017-0293-3
- Krakauer, J. W., Carmichael, S. T., Corbett, D., & Wittenberg, G. F. (2012). Getting neurorehabilitation right: what can be learned from animal models? Neurorehabilitation and Neural Repair, 26(8), 923–931. https://doi.org/10.1177/1545968312440745
- Maciejasz, P., et al. (2014). A survey on robotic devices for upper limb rehabilitation. Journal of NeuroEngineering and Rehabilitation, 11, 3. https://doi.org/10.1186/1743-0003-11-3
- Mehrholz, J., et al. (2020). Electromechanical-assisted training for improving arm function and activities of daily living after stroke. Cochrane Database of Systematic Reviews, 11:CD006876. https://doi.org/10.1002/14651858.CD006876.pub5
- Proietti, T., et al. (2016). Upper-limb robotic exoskeletons for neurorehabilitation: A review on control strategies. IEEE Reviews in Biomedical Engineering, 9, 4–14. https://doi.org/10.1109/RBME.2016.2552201
- Rodgers, H., Bosomworth, H., Krebs, H. I., et al. (2019). Robot assisted training for the upper limb after stroke (RATULS): a multicentre randomised controlled trial. The Lancet, 394(10192), 51–62. https://doi.org/10.1016/S0140-6736(19)31055-4
- Song, Y., Zhang, Y., Li, H., et al. (2023). Portable Rehabilitation Robots for Upper Limb Recovery Post-Stroke: Feasibility and Efficacy in Clinical Settings. Sensors, 23(7), 3012. https://doi.org/10.3390/s23073012
- Takebayashi T, Uchiyama Y, Okita Y, Domen K. Development of a program to determine optimal settings for robot-assisted rehabilitation of the post-stroke paretic upper extremity: a simulation study. Sci Rep. 2023 Jun 6;13(1):9217. doi: 10.1038/s41598-023-34556-3. PMID: 37280304; PMCID: PMC10244345.
- Tseng, K. C., Wang, L., Hsieh, C., & Wong, A. M. (2024). Portable robots for upper-limb rehabilitation after stroke: a systematic review and meta-analysis. Annals of Medicine, 56(1), 2337735. https://doi.org/10.1080/07853890.2024.2337735
- Zhang, L., Jia, G., Ma, J., Wang, S., & Cheng, L. (2022). Short and long-term effects of robot-assisted therapy on upper limb motor function and activity of daily living in patients post-stroke: a meta-analysis of randomized controlled trials. Journal of NeuroEngineering and Rehabilitation, 19(1), 76. https://doi.org/10.1186/s12984-022-01058-8
- Zhang, T., Yang, Z., Chen, J., et al. (2022). Efficacy of Upper Limb Robotic Therapy in Stroke Rehabilitation: A Systematic Review and Meta-analysis. Journal of NeuroEngineering and Rehabilitation, 19, 108. https://doi.org/10.1186/s12984-022-01070-4